 铭科达深耕电子制造业,根据不同产品类型的生产环境需求、工艺流程、产品特性、效率要求,研发了适合不同电子生产企业的检测设备、生产设备、生产线等..
铭科达深耕电子制造业,根据不同产品类型的生产环境需求、工艺流程、产品特性、效率要求,研发了适合不同电子生产企业的检测设备、生产设备、生产线等..

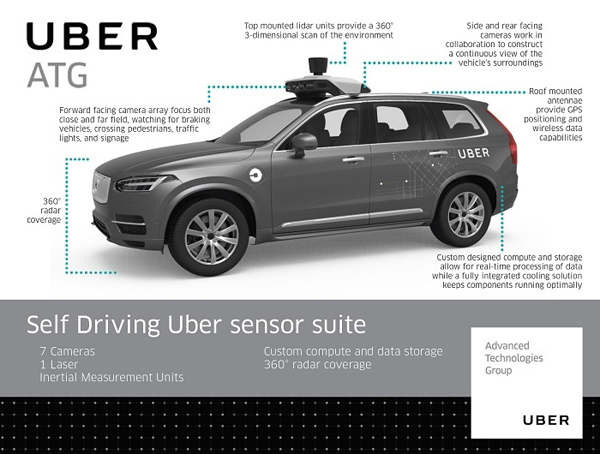
详解Uber自动驾驶汽车传感器系统
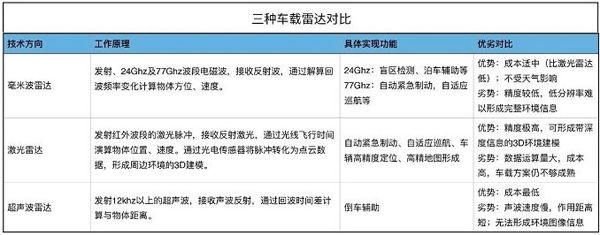
因为成本低,且技术相对成熟,毫米波雷达是当前自动驾驶传感器中应用最普遍的。
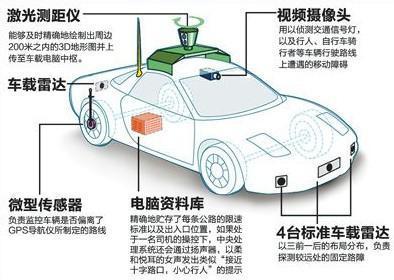
当前,车载摄像头有单目摄像头、后视摄像头、立体摄像头和环视摄像头四大类。其中,市场上主要以单目摄像头为主。
纵观各大自动驾驶汽车,大多选择的是混合搭配上述设备的方案,以形成一套完整的传感探测系统。如撞人致死的Uber自动驾驶汽车,其顶部就配备了一个Uber自家的激光雷达,前后也配备了多个无线电波雷达以及短程和长程光学相机。
回到国内,在自动驾驶领域,百度无人车近期可谓是风头正劲,更是在前几天拿到了北京市首批自动驾驶测试试验用临时号牌,并在北京亦庄正是开启了自动驾驶汽车上路测试。
这种搭配方式,实现了汽车远距离大范围探测。除此之外,相较于特斯拉,由于有了Velodyne激光雷达(单价约7万美元)的加持,让百度自动驾驶汽车具备了在暗光、密集环境中的行驶功能。当然,成本也相对较高。
除高速公路之外,城市街道也是未来自动驾驶汽车最大的应用场景之一。而在这一场景下,远距离大范围探测就无法满足实际需求了。


鄂公网安备 42011102003528号